AVT1585C STEROWNIK BIPOLARNEGO SILNIKA KROKOWEGO
Produkt dostępny w sprzedaży hurtowej
Waga: brak danych
Stan magazynu: 3 (możliwe jest zamówienie większej ilości towaru niż ilość dostępna w magazynie, jednak spowoduje to wydłużenie czasu realizacji zamówienia)
VAT: 23%
Cena
Cena dostępna po zalogowaniu
Opis produktu
AVT1585C STEROWNIK BIPOLARNEGO SILNIKA KROKOWEGO - WERSJA ZMONTOWANA
Prezentowany układ, oprócz prostej konstrukcji i małych wymiarów ma pewne dodatkowe ustawienia, których nie spotkamy w zwykłym sterowniku. Praca krokowa to najprostszy sposób sterowania silnika krokowego. Praca półkrokowa, to dodanie w sekwencji sterującej, stanów pośrednich. W praktyce powoduje bardziej płynną pracę silnika, ale zwiększa pobór prądu. I wreszcie wybór sposobu zatrzymania: statyczne lub dynamiczne. „Dynamiczne” tzn: na wyjściu sterownika utrzymuje się kombinacja sygnałów zasilających z momentu podania sygnału zatrzymania, czyli załączone są odpowiednie napięcia zasilające cewek silnika. W praktyce powoduje to jego zablokowanie w określonym położeniu, ale przez uzwojenia silnika przepływa prąd, co jest powodem ich nagrzewania się. Zatrzymanie statyczne powoduje odłączenie zasilania silnika w stanie zatrzymania. Tym samym jego oś obraca się swobodnie, a układ pobiera tylko niewielki prąd spoczynkowy.
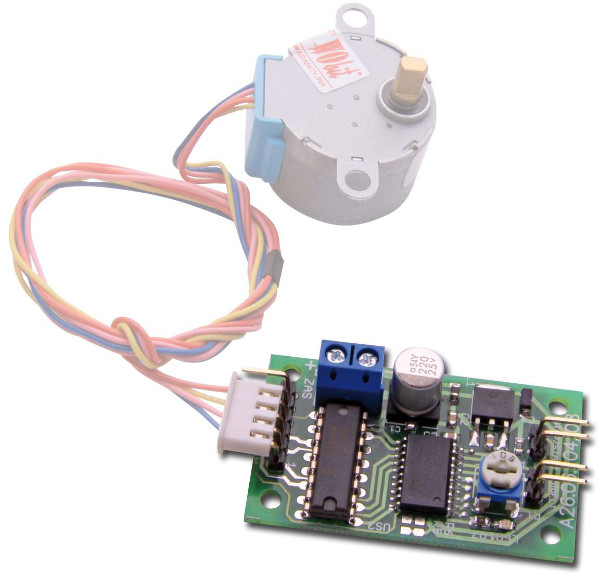
- prąd obciążenia kanał-cewka - max 0,6A
- do silników krokowych czteroprzewodowych
- wbudowany potencjometr do płynnej regulacji obrotów
- tryb pracy krokowej lub półkrokowej
- zatrzymanie statyczne lub dynamiczne
- wybór trybu pracy - zworki
- zasilanie 5-24Vdc
- wymiary płytki PCB 50x30mm
Zawartość zestawu zależy od wersji:
- [A] płytka PCB i dokumentacja
- [B] komplet elementów wymieniony w dokumentacji, płytka PCB (i zaprogramowany układ - jeśli występuje w projekcie)
- [C] zmontowany i uruchomiony zestaw B
- [UK] zaprogramowany układ
- [A+] płytka PCB, zaprogramowany układ i dokumentacja

Pliki i dokumenty
Zdjęcia produktu

Koszyk
Koszyk jest pusty.




